| Manufacture - Industrial Robots Hazardous Working for People |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
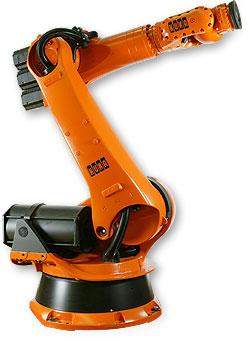
| Industrial Robots; A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement.[1][2] The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc., depending on the application. For example robot arms in automotive assembly lines perform a variety of tasks such as welding and parts rotation and placement during assembly. |
| The robot arms can be autonomous or controlled manually and can be used to perform a variety of tasks with great accuracy. The robotic arm can be fixed or mobile (i.e. wheeled) and can be designed for industrial or home applications. Robotic arm From Wikipedia, the free encyclopedia |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
 Industrial Robots - Click to Enlarge |
| I have coordinated and presented the pictures and information shown on TheOldRobots.Org with added links, to tell a story. The information and pictures presented is the work from existing web sites, is gathered from the Internet, and no claims have been taken except to recognize those web sites. I/WE DO NOT RECOMMEND, BUY AND/OR SELL ANYTHING ON THIS SITE. I acknowledge those who have gathered the information and thank them for it, and if anyone contests the use and wishes for the removal of the pictures and/or information, please contact me. |
Source: The Internet & Other Sources - Updated 4-14-2010